
Trolliga kaasa tulnud Sharp’i autopiloot on vist sama vana kui paat ise ja kuigi see töötab ei rooli see Trolli tänapäevase piloodi põhjalikkusega. Seetõttu otsustasime Sharp’i varupiloodiks tagandada ja hakkasime moodsamat lahendust otsima.
Siin mõned pildid Sharp Seapilot autopiloodist.

Sharp Seapilot'i juhtpaneel
Analoogelektroonikal ja täielikult dokumenteeritud. Seda saab parandada igal palmisaarel.
Sharp'i ajam
Ajam toimib keti kaudu roolirattale.
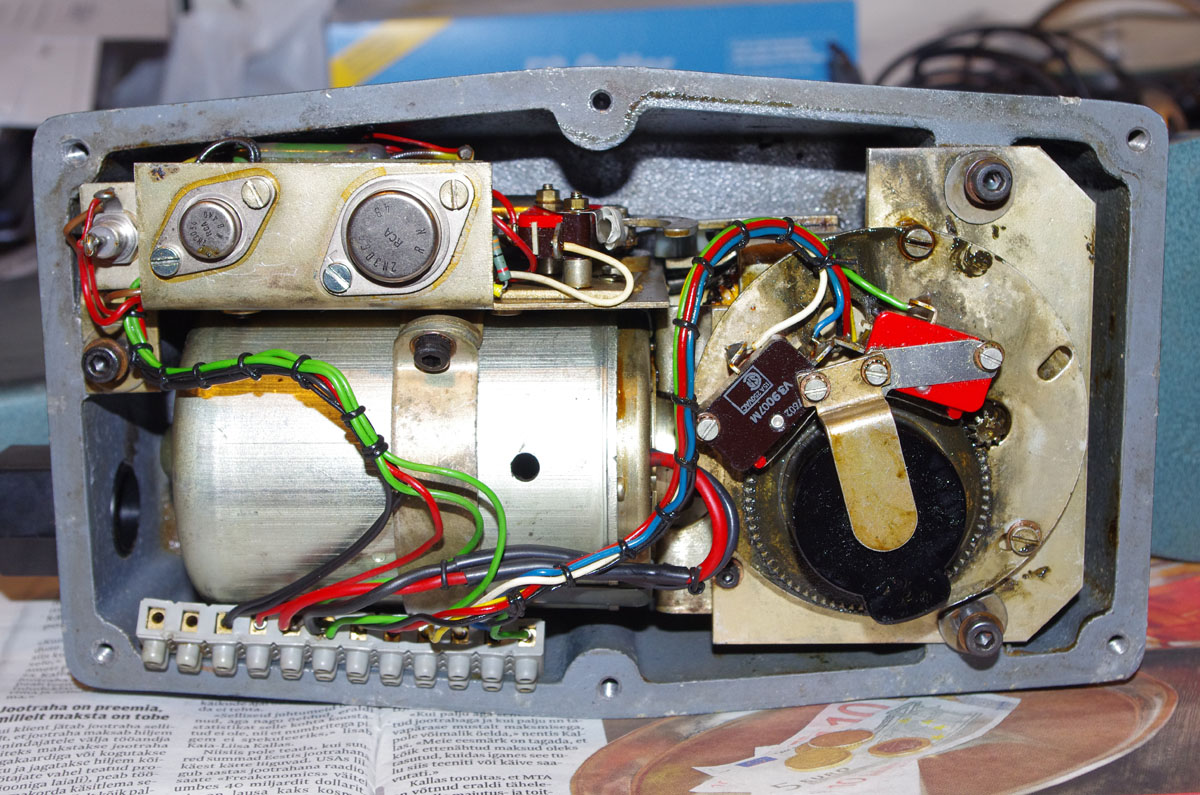
Sharp'i ajami sisu
Ajami tigu on kulunud. Sain selle siiski tööle.
Sharp'i ajami sisu
Siin on näha elektromagnet mis ühendab veetava ratta teoga.

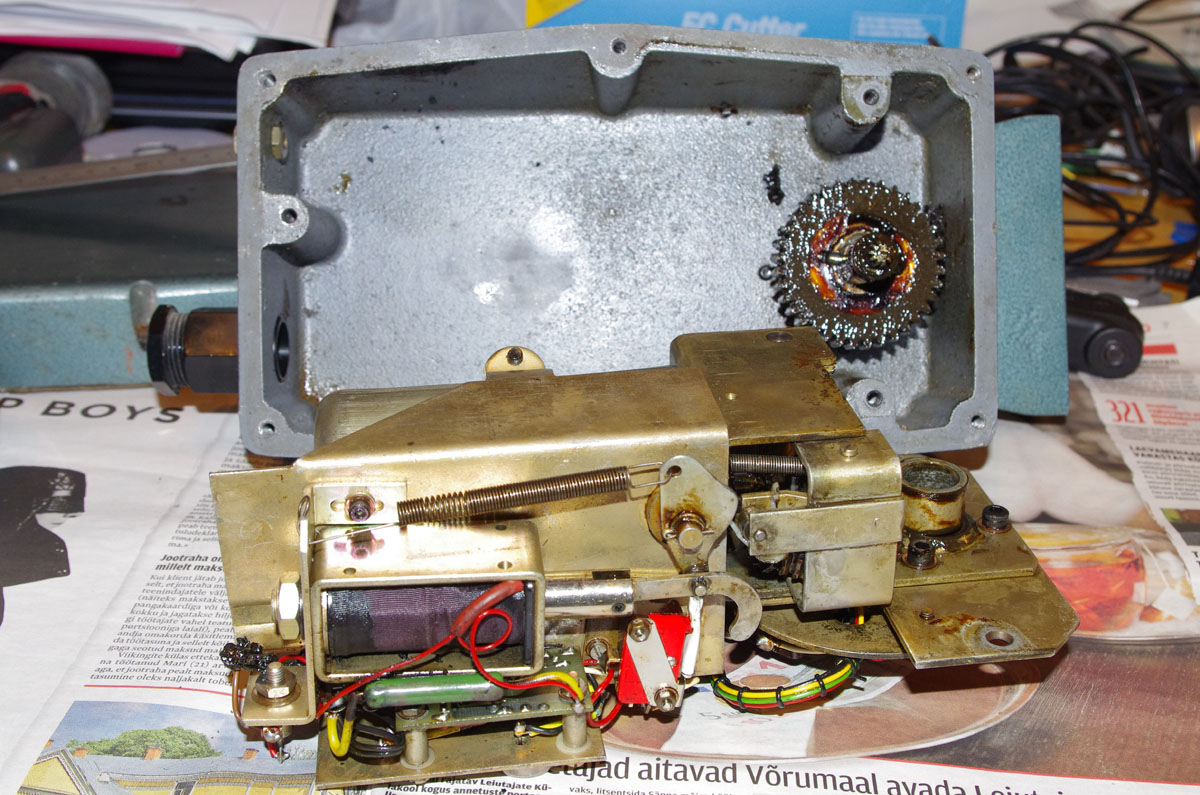
Sharp'i ajami sisu
Tigu ja veetav ratas.

Sharp'i ajami sisu
Piloot lahti ühendatud.
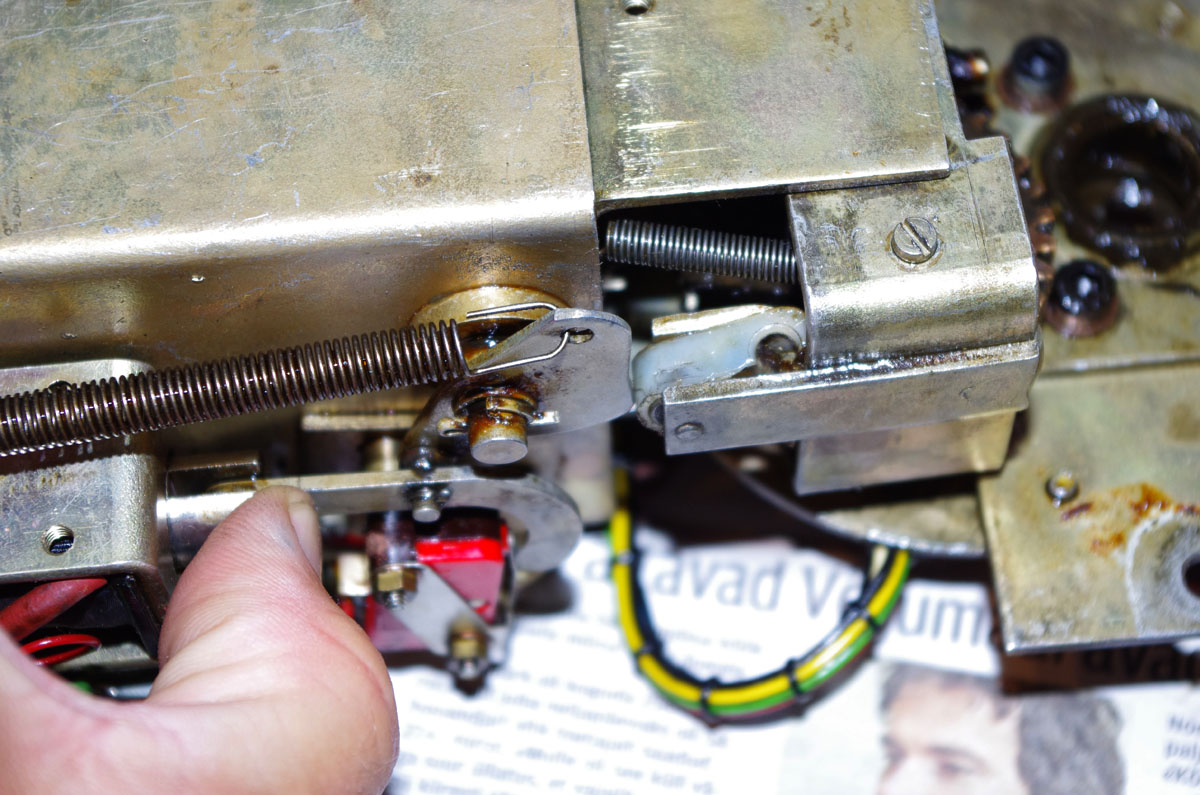
Sharp'i ajami sisu
Piloot kokku ühendatud.
Sharp'i ajami sisu
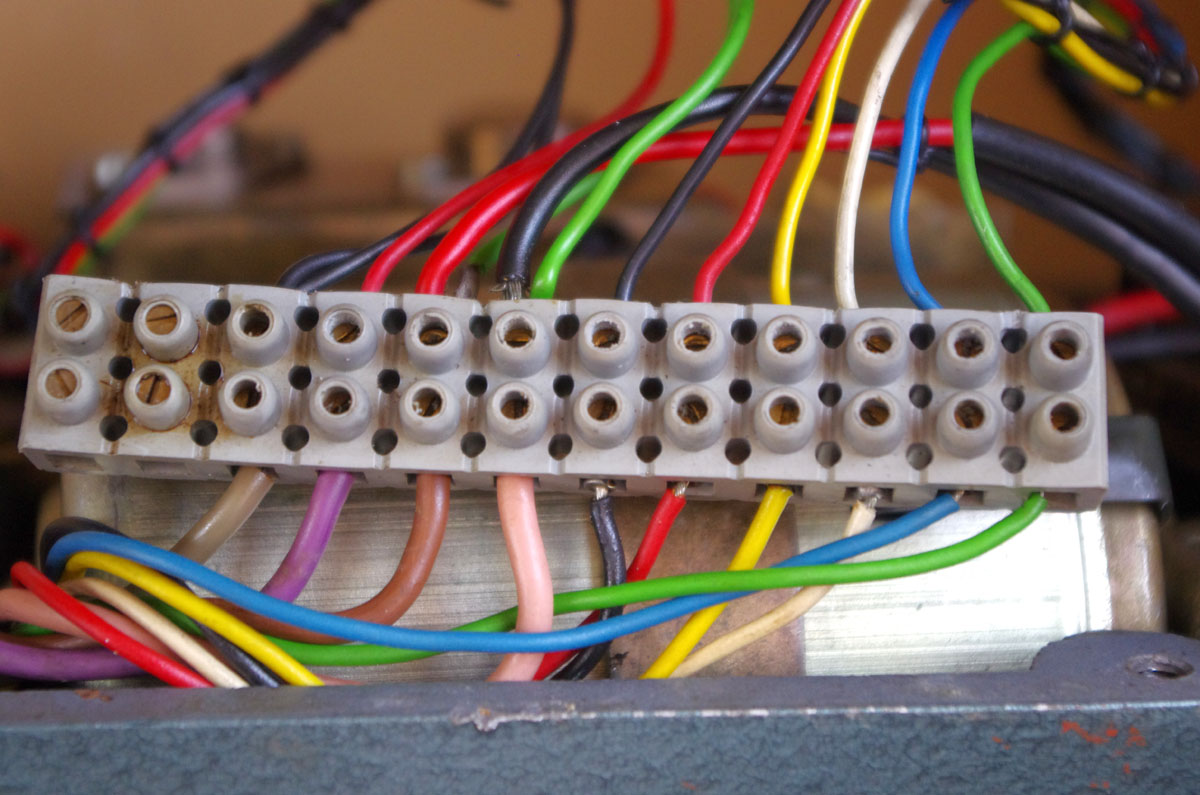
Nii käivad juhtmed kokku.
Uus piloot on kokku pandud Raymarine eelmise põlvkonna osadest. Ajamiks on elektriline lineaarne Type 2 mis arvestades Trolli alla 10t massi peaks olema olulise tugevusvaruga. Ajamit juhib SPX30 kontroller ja juhtpaneeliks on ST6002+. Autopilooti saab juhtida ka kaardiplotterilt ning salongis asuvalt ST60 graafiliselt displeilt. Lisaks sellele muidugi ka juhtmevabalt SmartController’ilt mille võib kasvõi koikusse kaasa võtta.
Uue piloodi ajam toimib otse roolipallerile. Seega jääb uus piloot tööle ka siis kui midagi juhtub trossidega mis ühendavad rooliratast roolipalleriga.

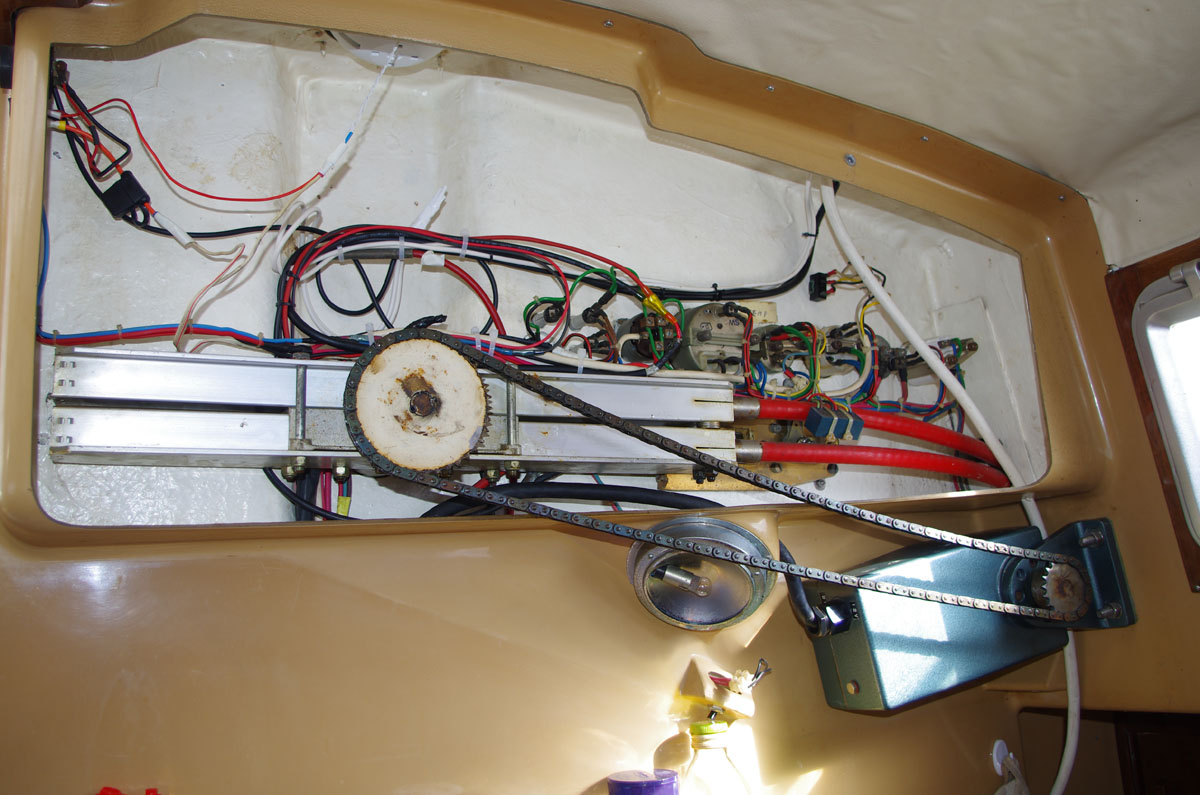
Ahtrikajuti lagi
Siin taga on rooliajam. Kuhugi siia ahtrikajuti lakke peab ka uus autopiloot tulema.

Sisemine ilu

Roolitrosside otsad
Mõlemad roolitrossid töötavad nii tõmbele kui ka tõukele. Süsteem jääb tööle ka ühe trossi katkedes, küll suurema lõtkuga.

Vana roolikang

Roolikang lähemalt
Neid on kaks ühesugust.
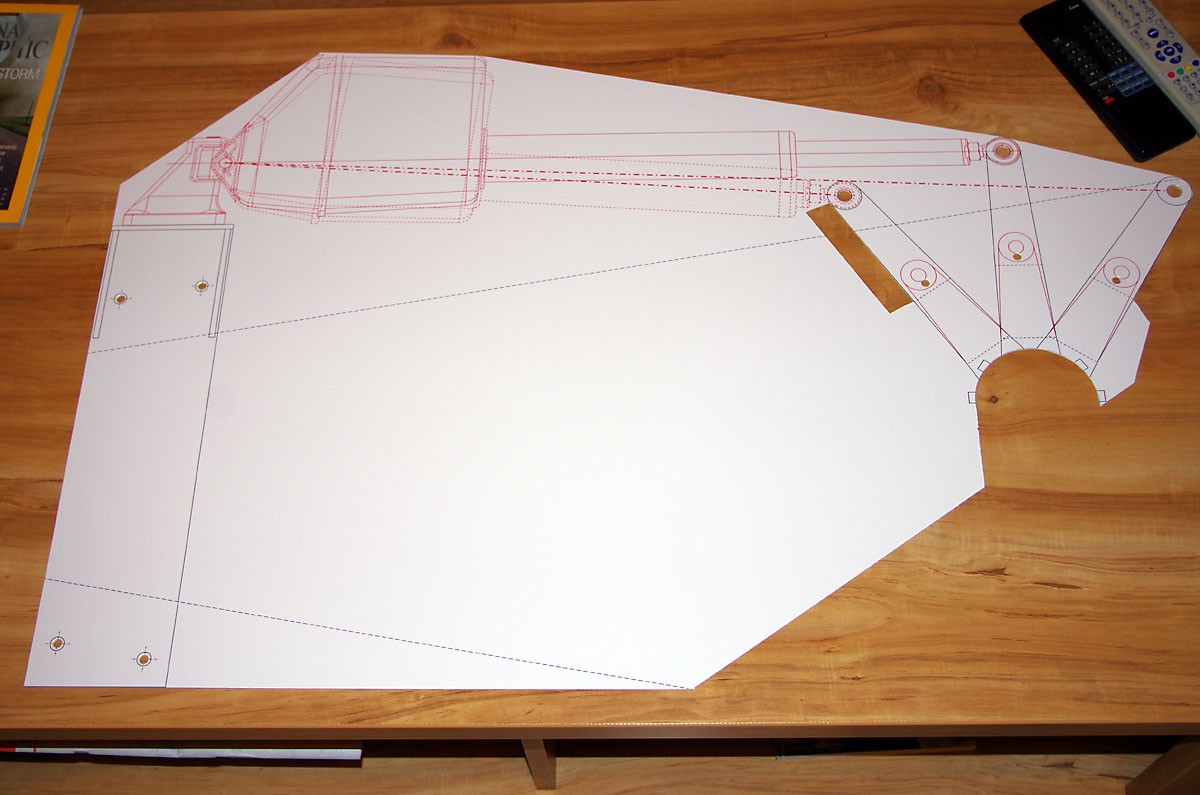
Šabloon
Kõigepealt tuleb mõelda ja joonistada, siis joonestada ja seejärel võib metallimeeste juurde minna.

Jooned laes

Ajami kronštein ja uued roolikangid.
Ühel roolikangil on lisaks roolitrossi õlale ka õlg piloodi ajamile. Kas on piisavalt tugevad?

Uued roolikangid

Uus ja vana
Uus on 10mm roostevabast terasest, vana on 8mm galvaniseeritud teras.

Kõik ei ole perfektne.

Lisatükid sisse keevitatud

Lisatükid lihvitud
Nüüd on raadiused ja nurgad paigas.
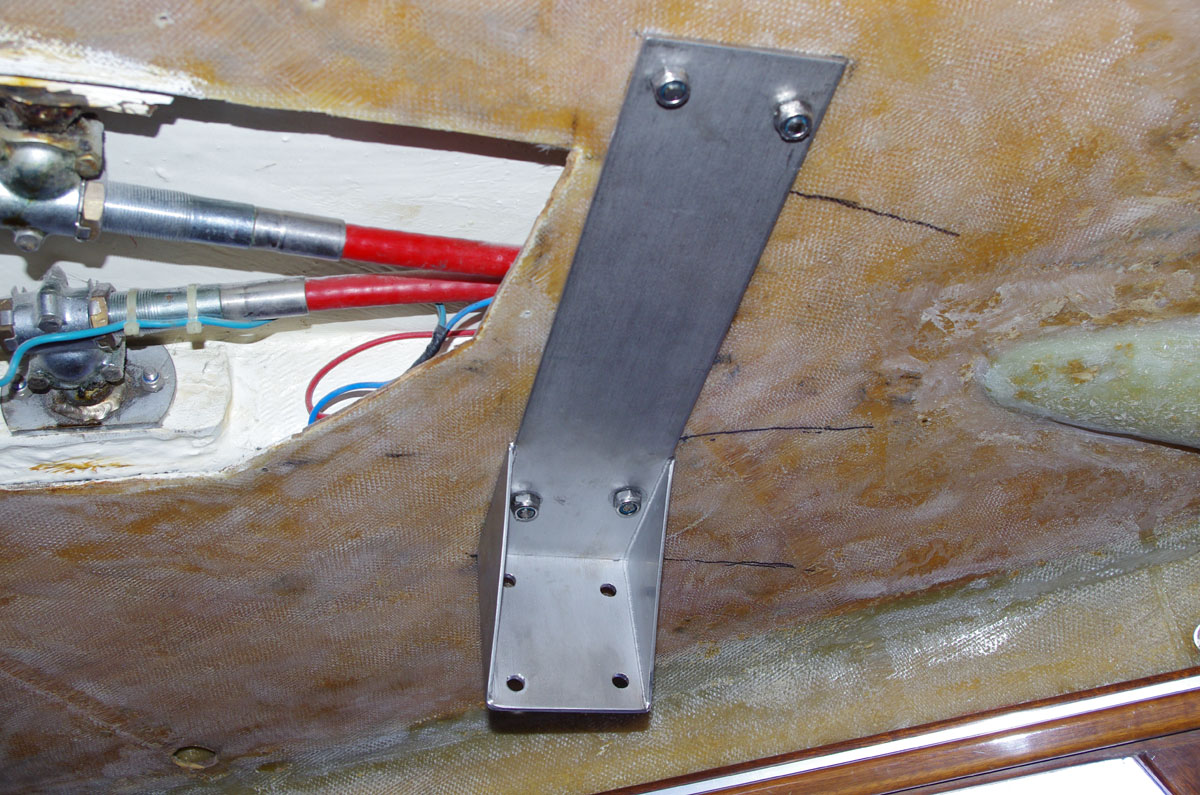
Piloodi kronštein
Kronštein on 5mm roostevabast terasest ja kinnitub nelja 10mm poldiga ahtrikajuti lakke. Piloodi ajami tõuge on pool tonni. Kas peab vastu?

Ajami kinnitus
Nii kinnitub piloodi ajam kronšteini külge.

Uus roolkang on paigas
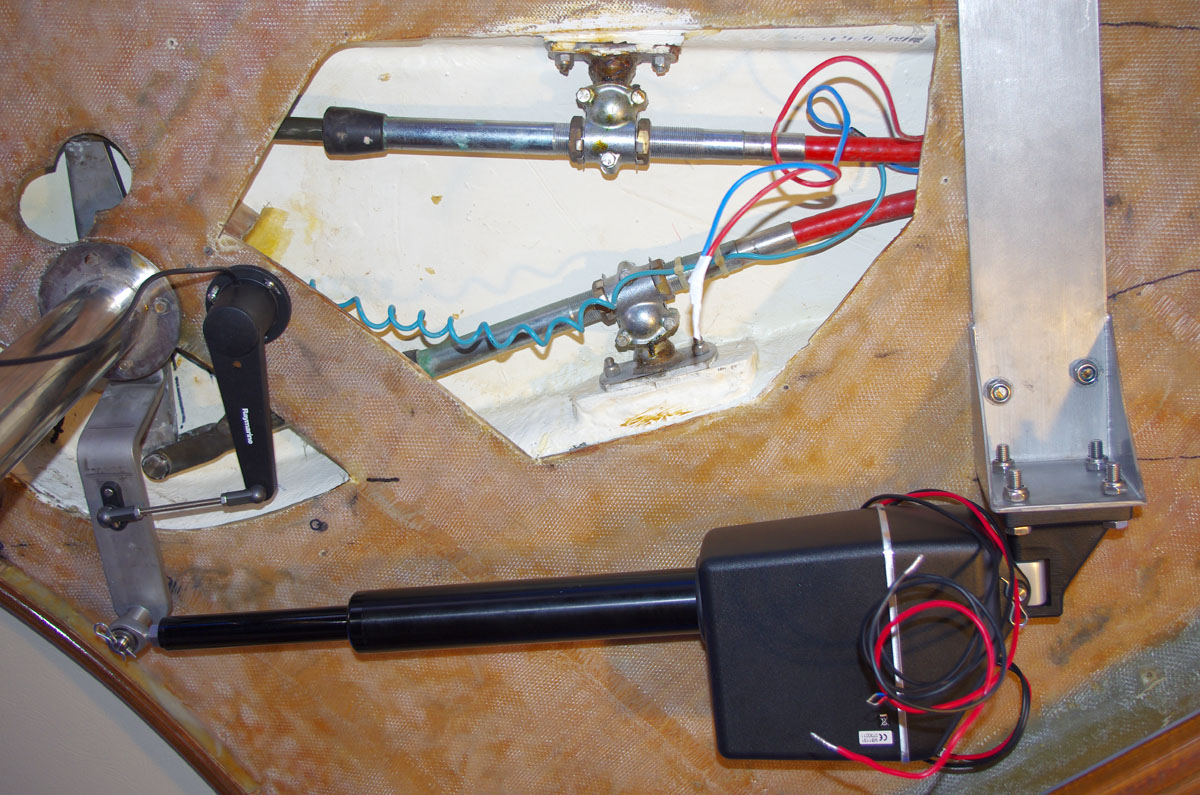
Piloodi ajam
Roolikangid paigas, ajam ühendatud ning roolinurga andur samuti paigas ja ühendatud.

Rooli nurga piiraja
Paigalduseeskiri nõuab, et rooli käik oleks piiratud +/-35 kraadiga. Roolikäigu piirajaks on PVC-st plokk mis on kinnitatud ahtrikajuti lakke kahe 10mm poldiga.
Piiraja poldid

Autopiloodi juhtpaneel
Näe, näitabki juba pilti.

Parandus Panamas
Kariibi merel tugevate passaatide üleskuhjatud tagantlaines, paar päeva enne Panamasse jõudmist väänas piloodi ajam selle 10mm roostevabast kangi puruks. Algselt keevitati osad lihtsalt kokku, aga nõudsime lisaks tugevduskolmnurki.

Modifitseeritud parandus
Shelter Bay Marina keevitaja tehtud parandus oli robustne ja vajas veidi kohendamist.

Kang paigas

Uus mõra
India Ookeani idaservas Christmas Islandi ja Cocos Keelingu vahel tekkis rooliõlga taas mõra.

Teine tugevdus
Tegelikult tahtsime selliseid tugevduskolmnurki paigaldada juba Panamas, aga see info läks kehvalt inglise keelt rääkiva keevitajaga suheldes kaotsi.

Kolmas kord katki
Kolmas kord purunes sama detail meil teistkordsel Atlandi ookeani ületusel umbes nädal enne Kariibidele jõudmist.

Taas töökorras
Seekord leidsime keevitaja Le Marini sadama lähistelt Martiniquelt. Nagu näha on nüüd roolikangi autopiloodiõla paksus kogu ulatuses endise 10 mm asemel 15 mm. Lisaks tugevdused. Nii oleks see pidanud algusest peale olema. Õhku jääb küsimus, et kas tugevama õla korral oleks rasketes tingimustes hoopis mingi muu detail purunenud? Lisaks sellele on roolikangi kinnituse neli 8 mm läbimõõduga polti on meil korduvalt purunenud ja välja vahetada nõudnud.
Kui teel Kariibidelt Panamasse, tugevas taganttuules ning kõrges ookeaniummikas, purunes meie autopilooti roolipalleriga ühendav õlg, siis oli peatselt selge, et varupiloodiks planeeritud vana Sharp nendes tingimustes Trolli roolimisega toime ei tule. Otsustasime vana Sharpi asemele paigaldada moodsamal tehnikal põhineva, kuid endiselt roolirattale toimiva autopiloodi. Idee on, et meil oleks kaks teineteisest täiest sõltumatut autopilooti ja et ühelt teisele üleminekuks tuleks vaid nuppu vajutada. Samuti peaks need kaks autopilooti põhinema sama põlvkonna tehnikal, et üksikosad oleksid nende vahel varuosadena vahetatavad.

Uus ajam ning juhtpaneel
Panamas tellisime uue Raymarini Type 1 Rotary Drive ja, kuna meil olemasolevaga identset ST6002+ kontrollpaneeli netist hetkel leida ei õnnestunud, uue Raymarine P70 kontrolleri. P70 ei ole kahjuks ühilduv meil kasutuses oleva SeaTalk võrguga. Küll aga saab seda ühendada SPX30 autopiloodiga kasutades SeaTalk(ng) võrku. Juhtfunktsioonid toimivad, aga displeile ei saa kuvada SeaTalk võrgus liikuvat informatsiooni.

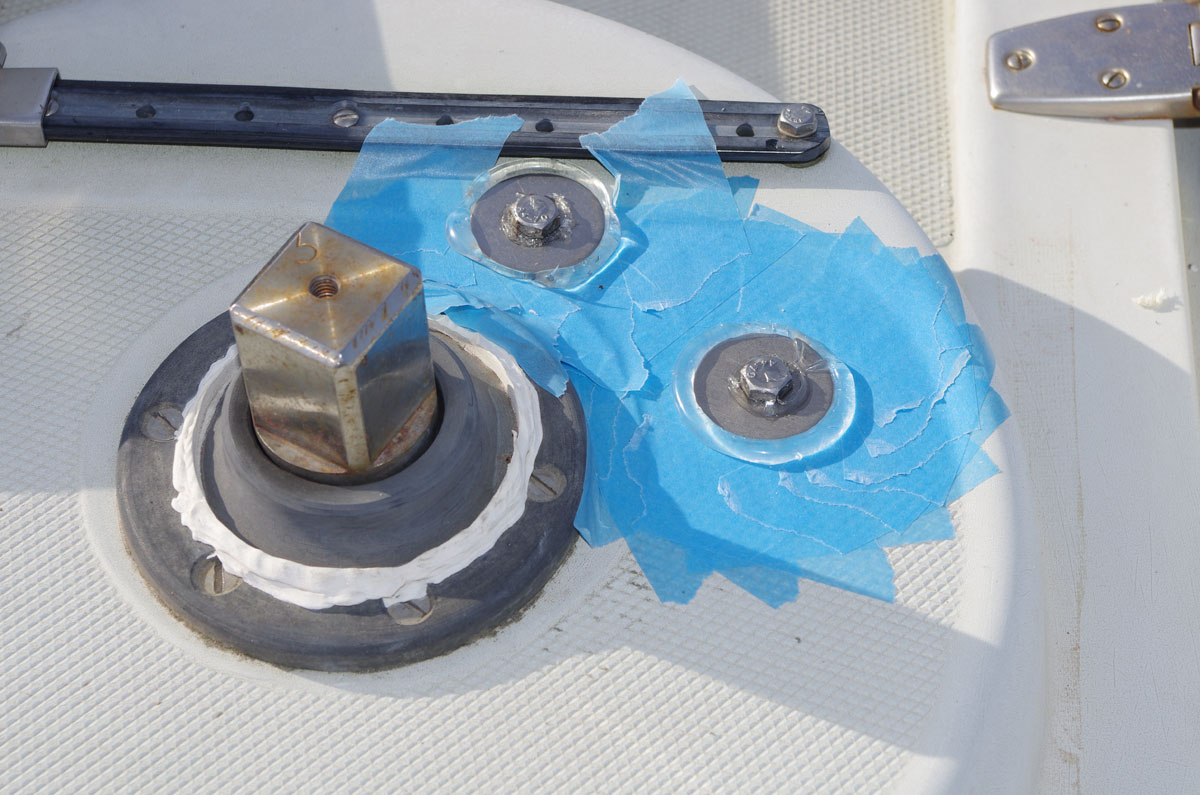
Ettevalmistused paigalduseks
Uue ajami ja enamuse muidki piloodi osasid paigaldasime rooli ja kambüüsiseina vahelisse ruumi. Kuna Raymarine ajam on vana Sharpi omaga võrreldes erineva konfiguratsiooniga, siis tuli vaheseina auk lõigata ja uus ajam jäi osaliselt kambüüsi kohale salongist nähtavaks.
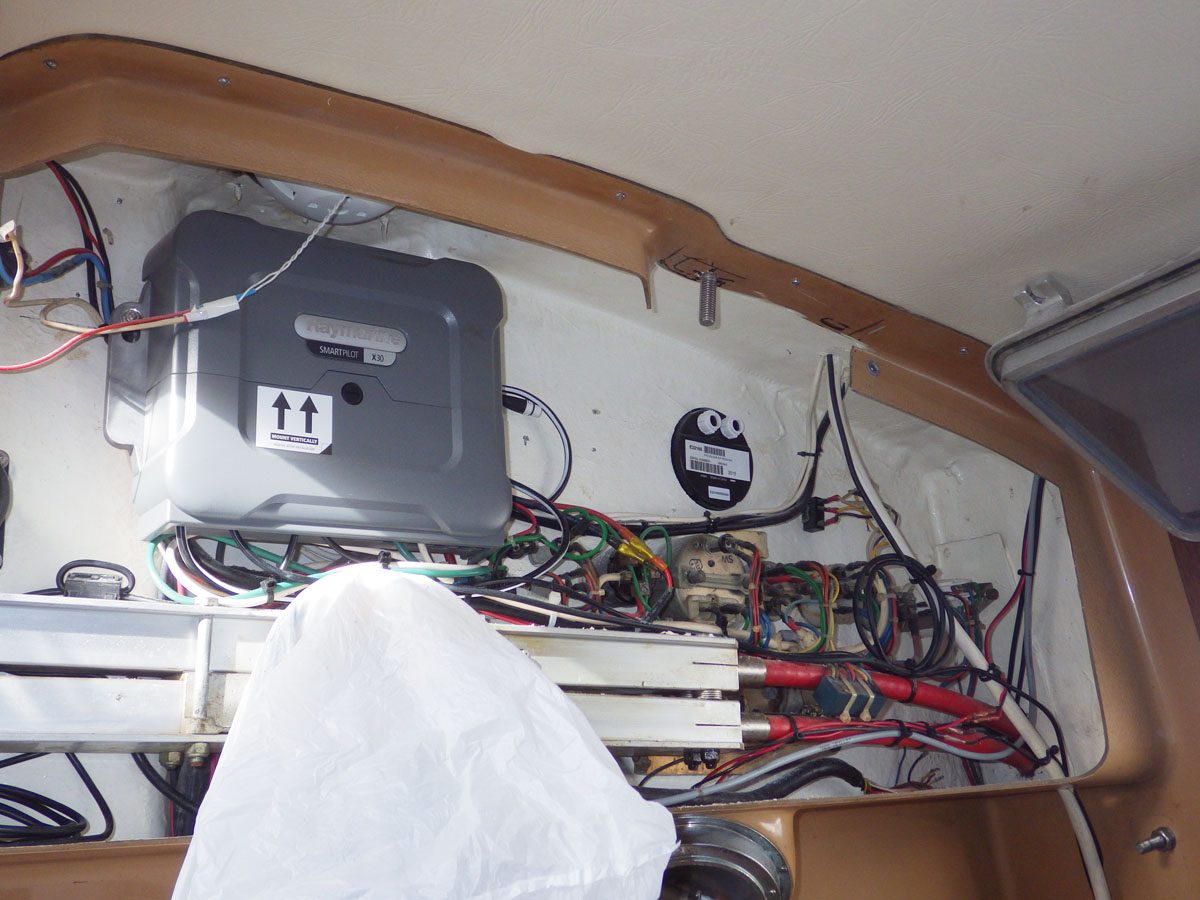
Piloot SPX30 ja kontrollpaneel
Kompass ja piloodi ajuplokk SPX30 (need olid meil varuosadena kaasas) ning kontrollpaneel mahutusid kenasti olemasolevasse ruumi. Pildi ülaservas on näha ka üks ajami kinnituspoltidest.

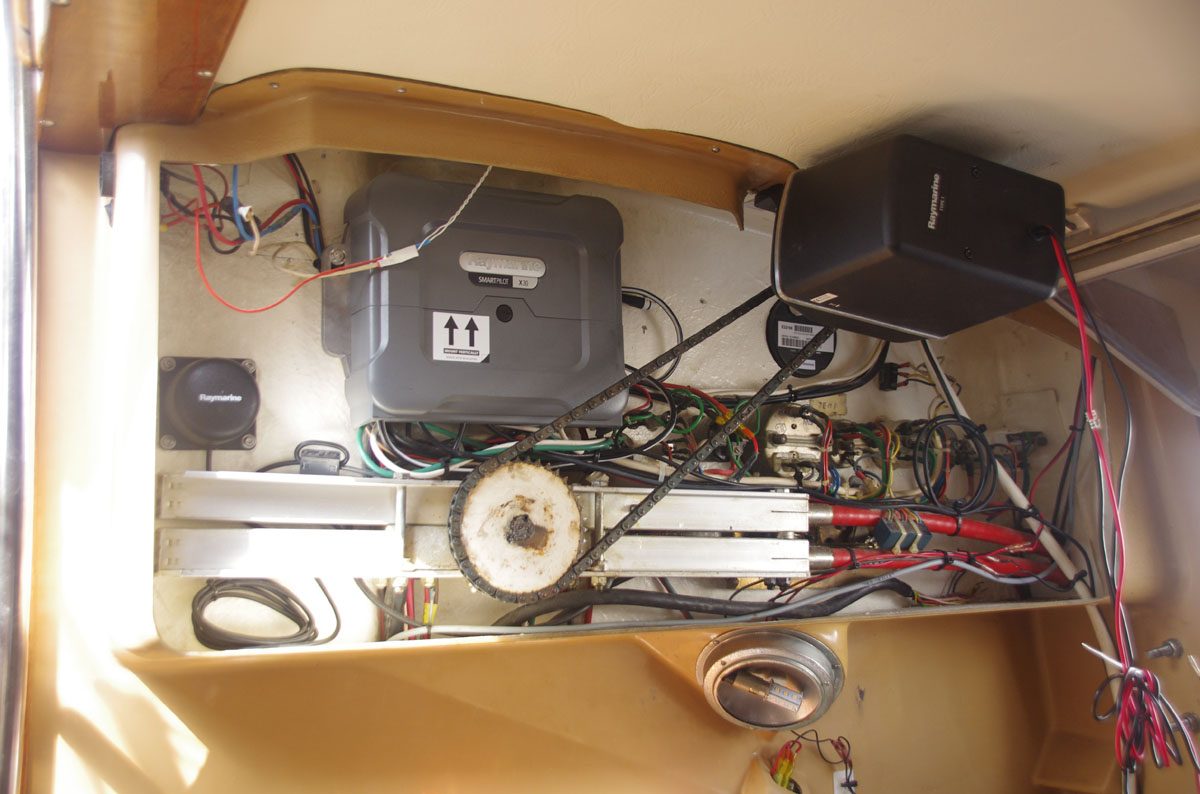
Ajam paigas
Ajami asukoht ei ole esteetiliselt ideaalne, aga kuna soovisime ülekandeks ära kasutada rooli olemasolevat ketiratast, siis ainuvõimalik.

Ajami kett
Kasutusse läks Sharpilt maha monteeritud vedav hammasratas ning vana ajami kett. Mõlemad neist on juba veidi väsinud ja ideaalsetes oludes oleksin vahetanud uute vastu nii keti kui ka mõlemad hammasrattad.

Keti mõõtmine
Kuna uus ajam asetseb rooli teljele lähemal kui vana, siis tuleb ketti lühendada.
Piloot paigas
Kõik on paigas ning valmis katsetusteks.

Kambüüsiseina kate
Tagasi läheb kambüüsiseina kate.

Varupiloodi ajam

Varupiloot töökorras
Type 1 ajamiga piloot töötab ka roolinurga andurita. Paigaldasin siiski ahtrikajuti laes oleva roolinurga anduri kaablile pistiku selliselt, et piloodi vahetuse korral saan anduri kiirelt varupiloodi kontrolleriga ühendada.